Présentation de mon 1er ROBOT
cahier des charges
-2 modes de fonctionnement
-manuelle: via une manette de pc
-choix du mode de fonctionnent auto ou manuel
-toute les direction (via les 4 touche jaune )
-automatique
-avance tout droit (utilisation de codeur inc)
-éviter tout les obstacle
-une taille réduite
-vitesse d'avancement raisonnable (1km/h
-autonomie elle aussi raisonnable

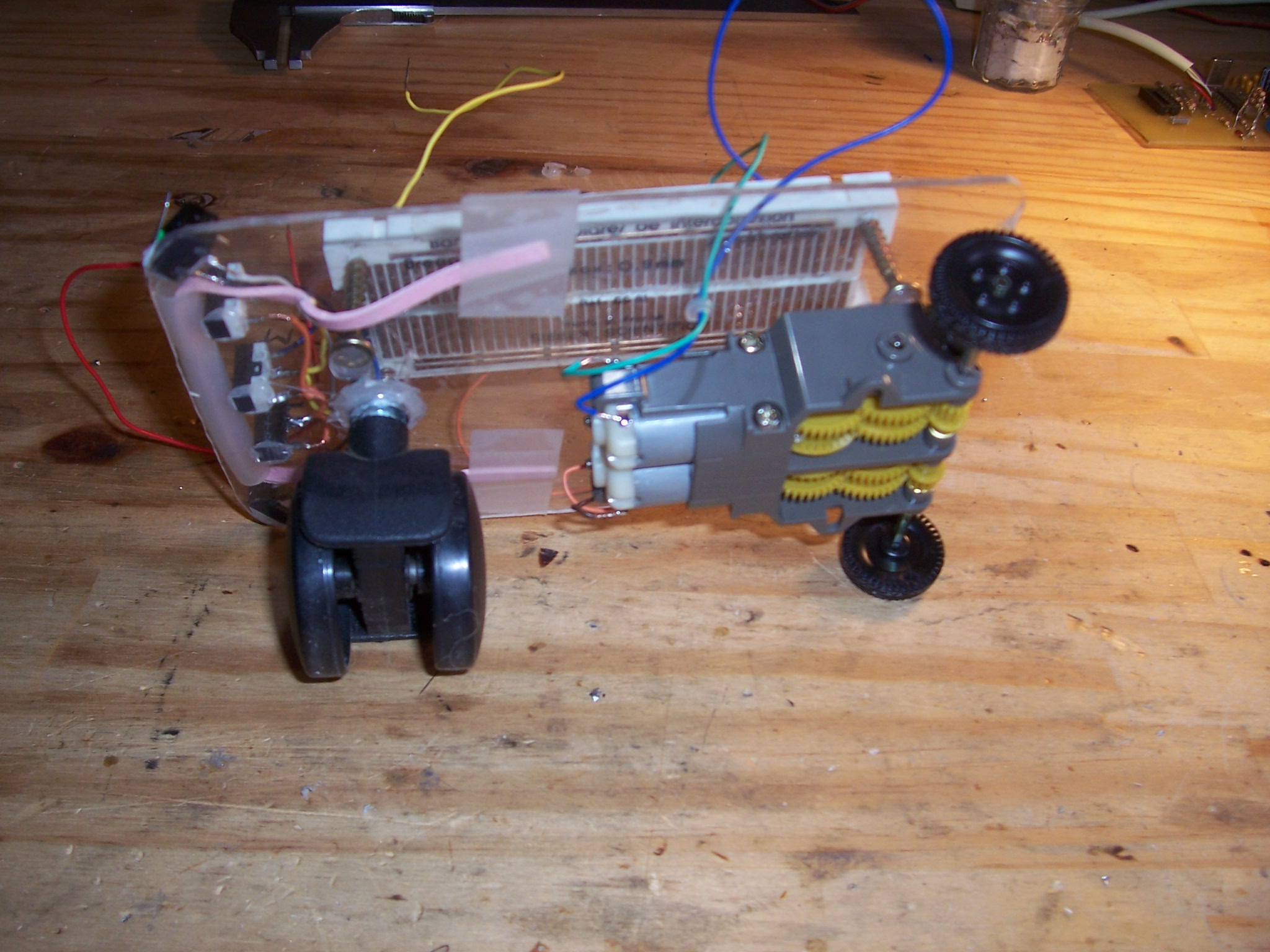
dans un 1er temps j'utilise des micro-rupteur comme capteur d'obstacle
une récupération sur des sourie de pc
le double motoreducteur et acheter sur "conrad" il manque de couple
enfin pour du matériel a 15€ il ne faut pas rêver

ensuite j'ai réaliser une carte de puissance ont peut la voir sous la plaque de teste
elle permet de commander le sens de rotation de chaque moteur
et aussi une commande par PWM (j'ai pas voulue d'une commande analogique )peut être sur mon prochain robot
ensuite on voit 2 coupleur de piles affin d'avoir une alimentation de 12V
et aussi des capteur IR de type TSOP qui permette de capter les obstacle a une distance de 10 a 15cm
Voici le schéma de la carte de puissance
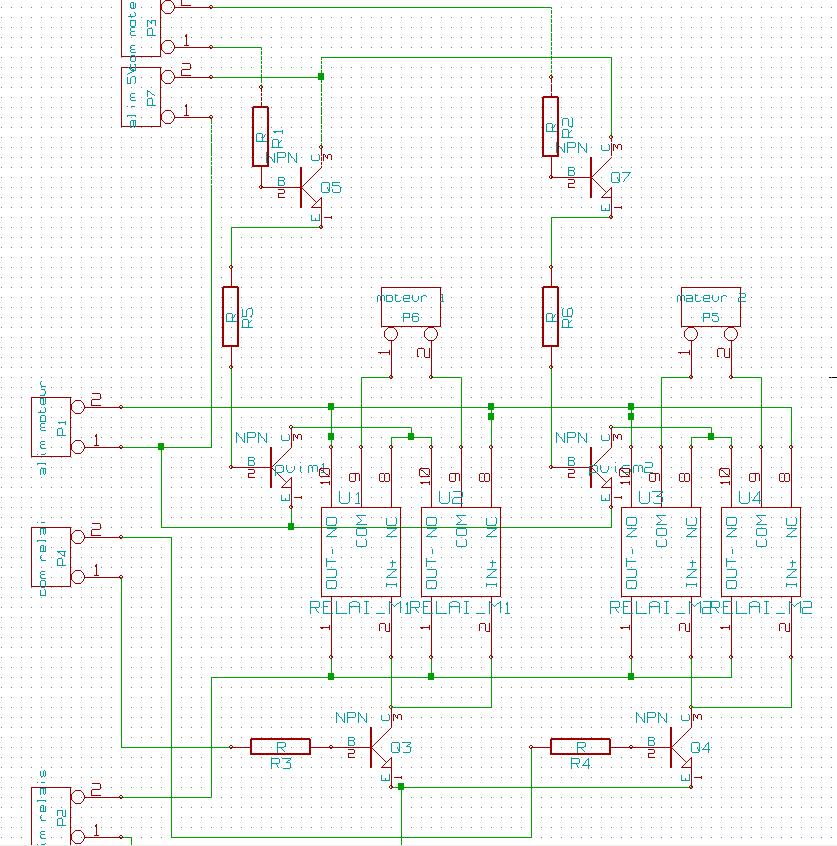
j'ai utiliser des reliais pour éviter un pond en H
car j'ai pas suffisamment de transistor de cette puissance
a savoir environ 500ma / moteur
et de plus cela simplifie la commande pour de la PWM


Voici la version de teste final tout fonctionne
il évite correctement les obstacles même si il à un
peut de mal à tourne en effet le motoreducteur à du mal
il ne reste plus que a faire un typon de ce montage et à le monter pour avoir fini ce robot
voici une petite vidéo
http://uploidperso.free.fr/video/bricole/100_1586.MOV
Pour tout autre info demande de typon etc..
merci de me contacter par mail
julienmarg-at-gmail.com
(-at-)=@